

Automap社製SLAMベースMobileMappingSystem
- オーストラリアの連邦科学産業研究機関(CSIRO)のSLAMアルゴリズム”Wildcat SLAM”を活用した製品
- RTKGNSSデータを使用した高精度な地図を作成
- GNSSのミスマッチによるコース間ズレの自動合成
- GNSS の可視、不可視環境の変化をシームレスに切り替え
- スキャナレンジ300mを使用したドリフトエラーの少ないエンジン
- 全周4Kビデオ撮影による着色処理
- 車両のシガーソケットを使用した車載とバッテリーを使用したウェアラブル計測が可能
- 特別な技術が不要なターンキーシステム
- 防水、防塵

計測サンプル
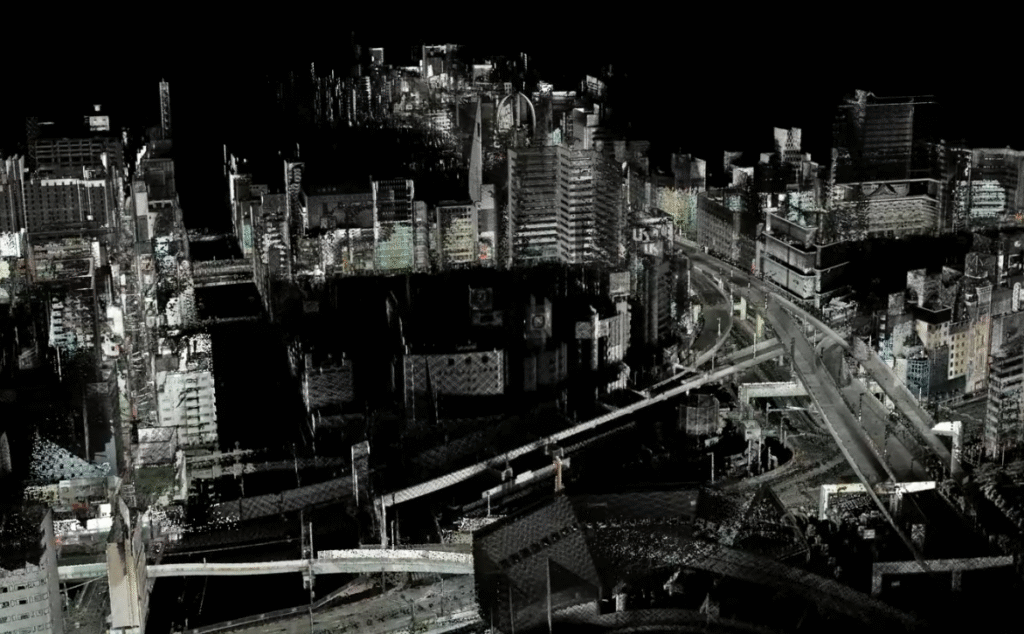
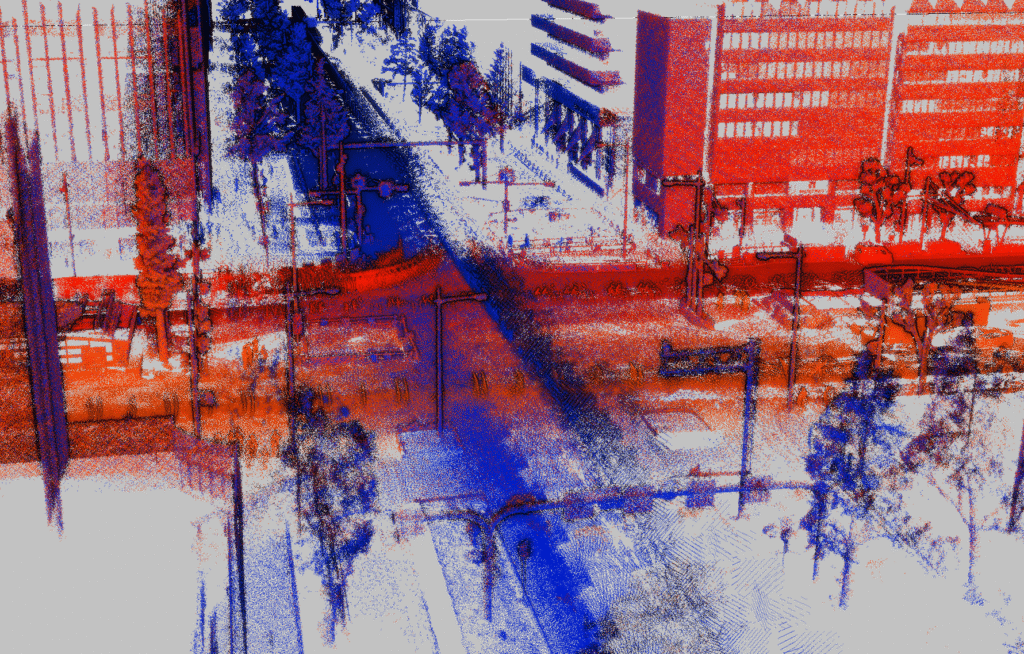
1.道頓堀
計測条件
- ウェアラブル
- 計測範囲 道頓堀川周辺
- 計測時間 15分
- 計測環境 通行車両および通行人がかなり多い

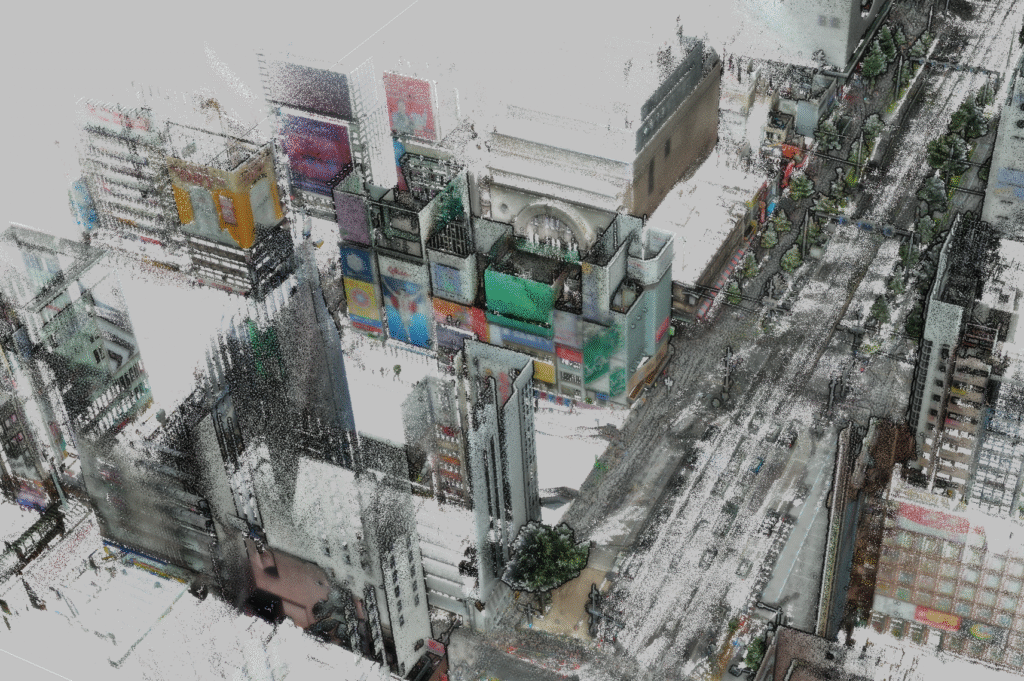
コメント
人混みの中での計測となり、地面付近に多くのノイズが入りましたが、SLAMにズレは見られませんでした。
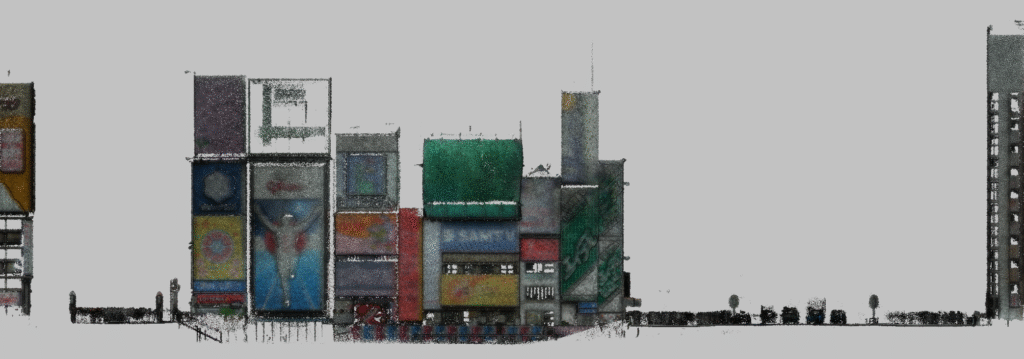
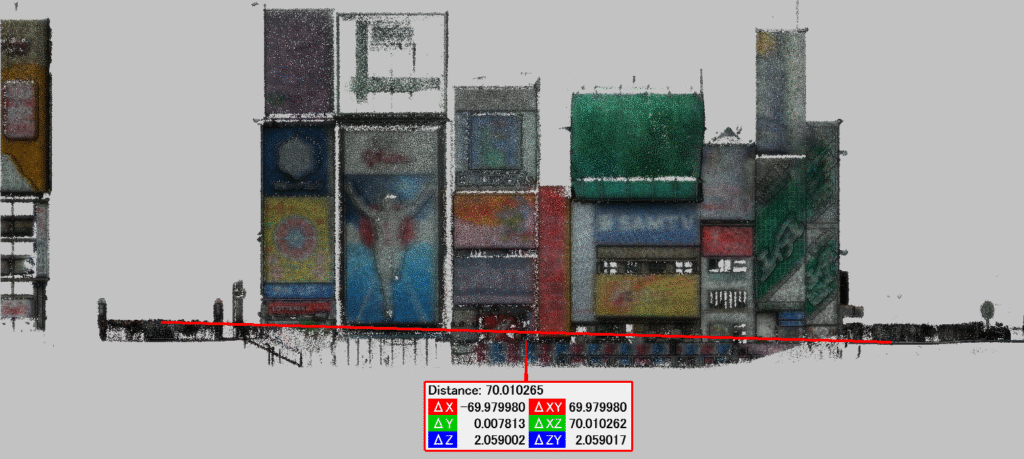
有効レンジが長いため、70m離れたコース間にある構造物もしっかり取得でき、
遠方にある看板の上部まではっきりと捉えられています。
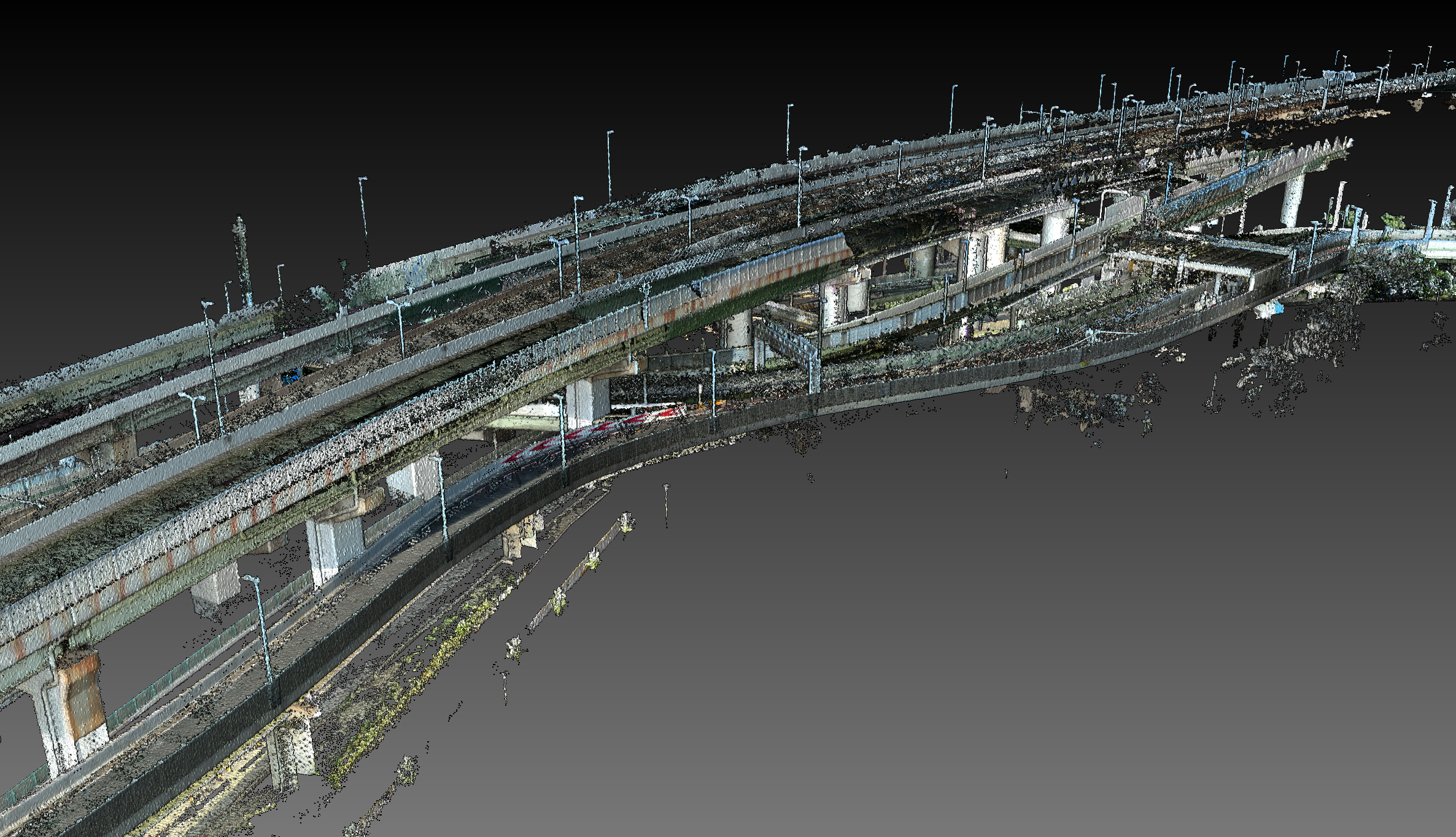
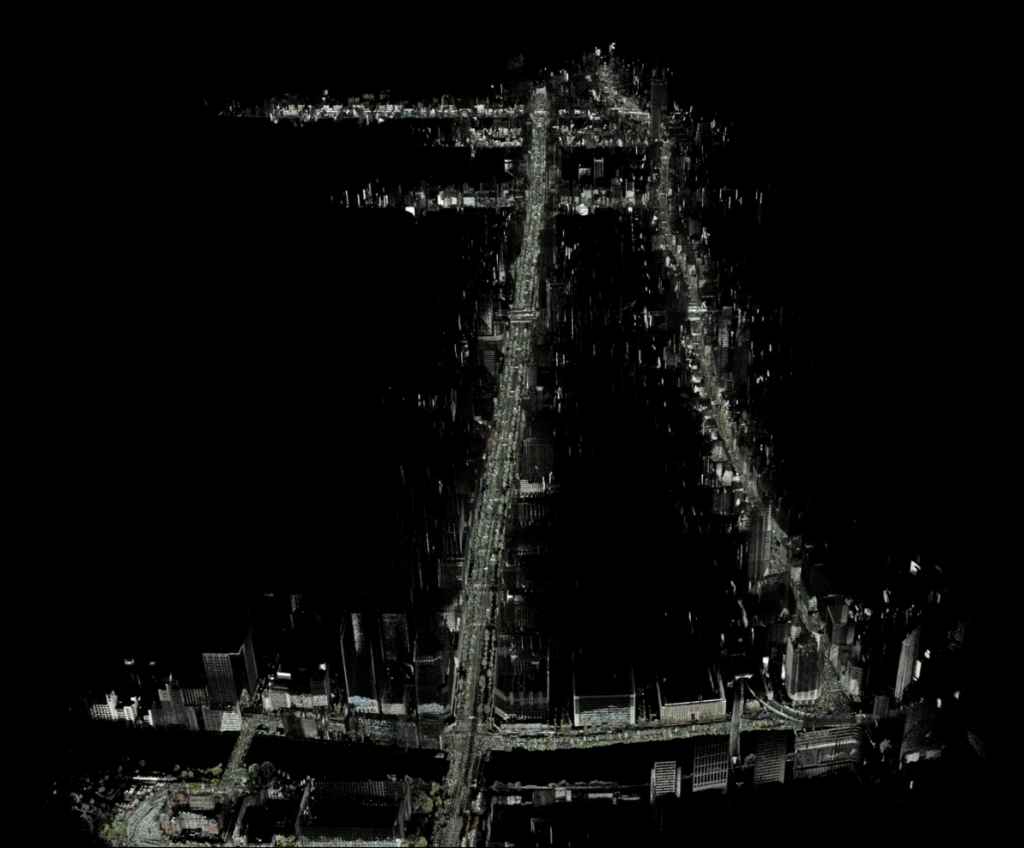
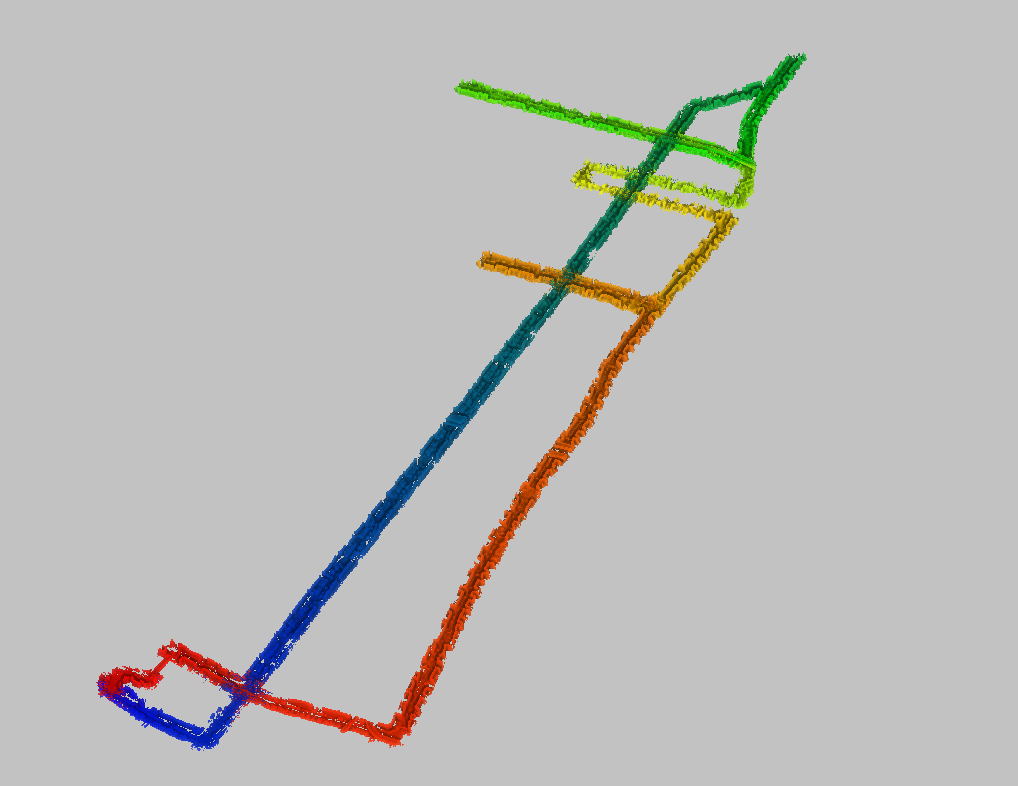
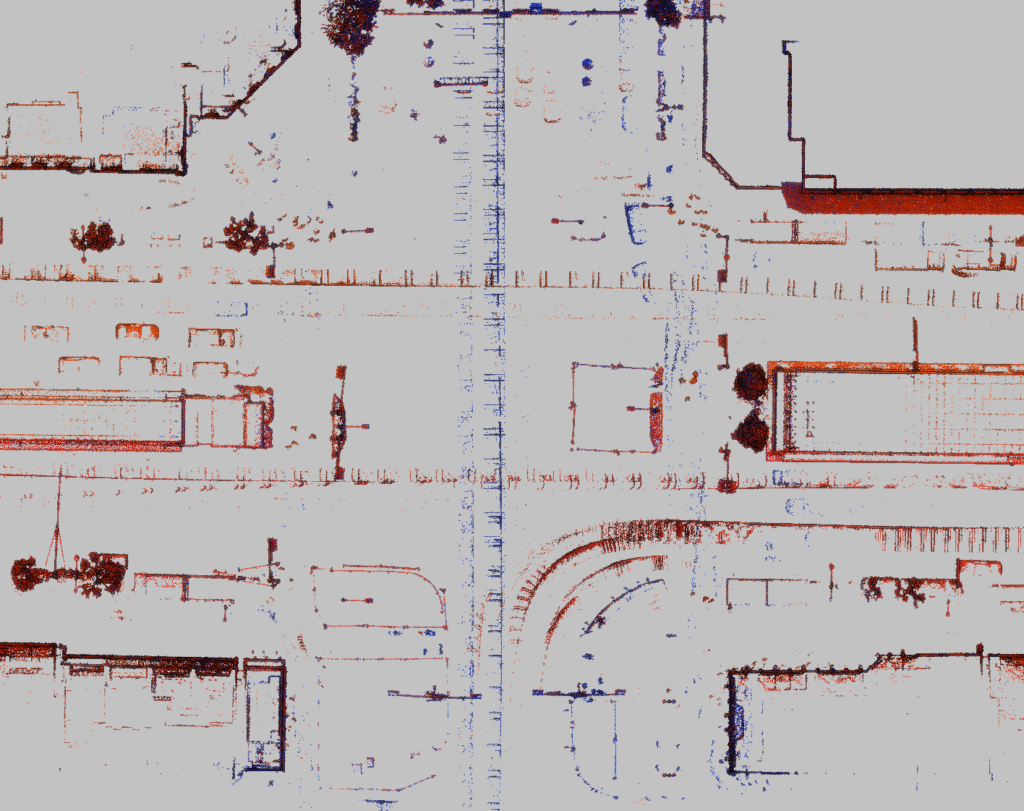
2.御堂筋
計測条件
- 車載
- 計測範囲 御堂筋および四ツ橋筋と交差する道路
- 計測時間 40分
- 計測環境 GNSS取得が困難な高架下とマルチパスの多いビル間


コメント
トラックなどの大型車両が多く、人通りも多い環境の中で、GNSSの可視・不可視が断続的に切り替わる状況下で長時間にわたる走行を行いました。
GNSS不可視環境での上下走行箇所の高架橋桁にズレもなく、
各筋をつなぐ通りを数回往復した結果も、点群のズレは発生しませんでした。
問い合わせ先
株式会社ジオメトラ GEOMETRA
田中 恭介 Kyosuke Tanaka
Tel. 09098853443
Mail.kyosuketanaka@geometra.jp
Address.541-0059
大阪府大阪市中央区博労町4-7-1 ノバカネイチ本町御堂1002
コメントを残す